Elevar el juego de inspección de tuberías
-109094 "XO-450 de XOCEAN (Foto: XOCEAN)")
Hay una sacudida en el negocio de inspecciones de tuberías. Los vehículos operados a distancia (ROV) más evolucionados, las aspiraciones digitales y los buques de superficie no tripulados (USV) están impulsando una nueva era de adquisición de datos y entregables.
Ofrece una especie de revolución en la cantidad de nuevos conocimientos que los operadores pueden adquirir en sus tuberías, al tiempo que reduce el tiempo de campaña en alta mar.
Algunos de los que operan en el espacio son Equinor, Shell y BP. Un gran impulsor ha sido reducir los costos, así como minimizar la exposición a la seguridad. Es la última evolución en este espacio, Tom Glancy, asesor de mapeo de tuberías e información geográfica en Equinor, resumido en una reunión de la Sociedad Hidrográfica de octubre en Aberdeen.
Él dice que la operación remota de vehículos, durante su propia carrera, ha pasado de sumergibles tripulados sin ataduras (poniendo en riesgo a los humanos) a vehículos todo terreno no tripulados (vehículos submarinos no tripulados) (UUV, generalmente conocidos como vehículos submarinos autónomos / AUV, aunque no es totalmente autónomo, destaca Glancy). Si bien el cambio a los ROV eliminó a los humanos del riesgo, la atadura que los conectaba a una embarcación de apoyo limitó su alcance. Los AUV significaron que las encuestas se podían hacer más rápido, pero los AUV no pudieron detenerse y realizar evaluaciones puntuales detalladas cuando se detectó un problema.
Una evolución más reciente ha sido hacia los ROV rápidos. Equinor tiene acuerdos con los dos proveedores principales, DeepOcean, que utiliza el ROV superior, y llega a Subsea con el ROV de Surveyor Interceptor, dice Glancy. Si bien ambos están atados, pueden inspeccionar más rápido que un ROV, a 4 nudos (kt) en comparación con 2kt, dice Glancy, gracias en parte a sus paquetes de imágenes HD y láser a bordo. Pero, eso también significa que vienen con un recipiente de soporte, y los gastos generales que vienen con él.
Estos ROV rápidos se han convertido en una herramienta popular, cambiando completamente el flujo de trabajo tradicional de inspección de tuberías. “En las últimas dos o tres décadas, la inspección de tuberías ha sido un flujo de trabajo relativamente simple; una campaña, utilizando dos contratistas, haciendo dos encuestas separadas ", comenzando en abril y terminando en agosto, Calum Shand, topógrafo de proyectos senior en Shell, le dijo a Offshore Europe en Aberdeen a principios de este año. Primero, un buque de prospección geofísica remolca un vehículo remolcado operado de forma remota (ROTV) con un sonar de exploración lateral sobre las secciones abiertas de la tubería de agua. Luego se crean informes de anomalías, que requieren una segunda encuesta donde un ROV de clase de trabajo (con una embarcación de clase DP2), realiza inmersiones puntuales y adquiere imágenes de video que luego se utilizan para planificar cualquier rectificación adicional. Pero, "es lento y relativamente ineficiente, con respecto al uso de una campaña de dos buques", dice Shand.
 El SROV Superior (Foto: DeepOcean)
El SROV Superior (Foto: DeepOcean)
Eficiencia creciente
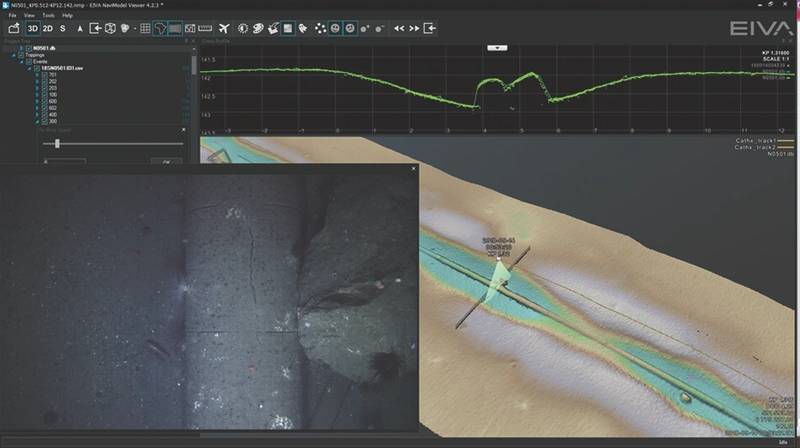
Para Shell, con más de 200 tuberías y umbilicales, con un total de 3.000 kilómetros (km) de longitud, solo en el Mar del Norte del Reino Unido, las encuestas más fáciles y rápidas son una ventaja tangible. En 2018, Shell realizó una nueva encuesta utilizando el "Servicio rápido de imágenes digitales" de DeepOcean. Esto involucró un ROV Kyst Design Superior, con capacidad de seguimiento automático, operado desde la embarcación Edda Flora en una campaña ininterrumpida de 45 días, a partir de septiembre de 2018. El Superior estaba equipado con ecosondas de haz múltiple de doble cabezal Teledyne, sonda de exploración lateral Edgetech y perfilador inferior inferior, rastreador de tuberías, cámaras CathX de ultra alta definición (UHD) (x3) y navegación inercial de alta especificación. La capacidad de lanzar la embarcación en mares de hasta 4,5 metros significaba que el trabajo podría comenzar más temprano en la temporada y llegar tarde al otoño, dice Shand, con velocidades de 5 kt en modo acústico y de 3,5 a 4 kt para la inspección de la tubería.
Además, tener el sonar de exploración lateral significaba que la embarcación podría salir de la encuesta de la tubería para ejecutar "trabajos de vuelo ad-hoc", como una inspección del sitio de la plataforma de elevación en el campo Shearwater, dice Shand. Pero, el mayor beneficio fueron las imágenes UHD creadas por el sistema CathX, que permitieron "detalles increíbles". "Cuando te acercas, presentas detalles por debajo del centímetro y puedes hacer inferencias sobre lo que está sucediendo, como marcar en la parte superior de una tubería por interferencia de pesca", dice.
Combinadas con datos de batimetría multihaz de alta resolución, estas fotos UHD ofrecen una forma completamente nueva de revisar incidentes y anomalías, a través de modelos de malla 3D y nubes de puntos de color, con la comparación automática de conjuntos de datos de encuestas anuales ahora posibles, dice. "Estos conjuntos de datos están creando un gran revuelo", dice Shand. "Es un cambio radical".
 (Imagen: Shell)
(Imagen: Shell)
Decisiones de manejo de datos
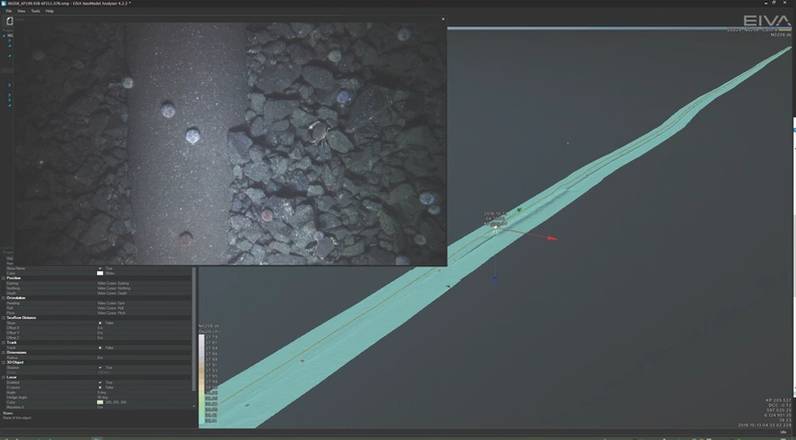
Con esta capacidad, la remediación también puede ser más rápida. Por ejemplo, al descubrir un nuevo tramo libre de tubería, Shell pudo exportar los datos del haz de luz y pasarlos al contratista, Van Oord, quien pudo calcular con precisión la cantidad de roca necesaria. Además, los ingenieros de tuberías ahora tienen una mejor capacidad para comparar la información heredada "tal como está construida", con los datos multihaz "tal como se encuentran" recientemente.
Este año [2019], Shell volvió a salir, esta vez con Reach Subsea usando el vehículo Surveyor Interceptor, diseñado con MMT y Kyst, equipado con brazos de pluma. Estos proporcionan una mejor cobertura circunferencial de la tubería. "Hemos pasado de hacer una campaña con dos buques a una campaña con un solo buque / contratista", dice Shand. "Hemos ahorrado alrededor de £ 800,000 ($ 1 millón), en comparación con la antigua forma de hacerlo, y como consecuencia, emitimos menos dióxido de carbono (CO2)" en gran parte gracias a un 50% menos de tiempo de embarcación.
Ha habido una curva de aprendizaje, especialmente alrededor de tratar de automatizar el procesamiento de datos asociado y luego en el manejo del gran volumen de datos generados, agrega Shand. También hay algunas barreras para hacer este trabajo de manera diferente, en relación con los comportamientos y los flujos de trabajo. Sin embargo, Shand dice que el potencial es significativo, incluida la integración de datos de encuestas modeladas en 3D, vinculadas con SIG, con modelos CAD y también datos de inspección de tuberías internas, lo que permite una vista poderosa de todo el sistema de tuberías. Agregar visión artificial y aprendizaje profundo a eso, donde la detección de rocas, escombros, limpieza, etc. es automática, permitirá operaciones más automatizadas y una mayor capacidad de análisis predictivo en lugar de operaciones reactivas, dice Shand.
 (Imagen: Shell)
(Imagen: Shell)
Inspección rápida de imágenes digitales
La inspección rápida de imágenes digitales (FDII), pasar de video a digital que puede permitir eventos automáticos y aumentar la velocidad de inspección, también ha sido una fuerza impulsora para BP. Eric Primeau, especialista en tecnología sénior de BP, dijo a la conferencia Underwater Robotics de Subsea UK en Aberdeen que se trata de adoptar un enfoque de abajo hacia arriba, seleccionar un paquete de sensores y luego el vehículo que debe continuar, en lugar de elegir el vehículo primero.
La compañía realizó su primera campaña FDII con DeepOcean en 2017, realizando 478 km de inspección de tuberías, con imágenes digitales UHD, láser, multihaz de doble cabezal y sonda de exploración lateral a un promedio de 5.1 km / hora. El proyecto se completó en 94,7 horas en comparación con las 578 horas previstas con una metodología tradicional. Los datos finales incluyeron malla 3D y nubes de puntos láser coloreadas.
BP ha seguido con otras dos campañas en 2018, con MMT e i-Tech7, y luego otra en 2019, nuevamente con i-Tech7. A lo largo de estos proyectos, BP también ha estado probando sensores de protección catódica de gradiente de campo sin contacto. Sin embargo, al igual que Shand, procesar los datos recopilados por este enfoque ha sido un desafío.
 (Imagen: BP)
(Imagen: BP)
Ir sin un buque de superficie tripulado
Sin embargo, este método todavía requiere el uso de un recipiente de apoyo tripulado. Por lo tanto, los operadores han estado siguiendo el uso de USV para la inspección de tuberías. A principios de este año (2019), BP intentó la inspección de tuberías utilizando un XOCEAN XO-450 USV, el primero para el Mar del Norte. Desplegando el USV desde Peterhead, en el noreste de Escocia, BP inspeccionó una sección de aguas poco profundas del oleoducto de exportación de Miller abandonado de 30 pulgadas. En una segunda corrida, desde solo 2.5m de profundidad de agua hasta 40m de profundidad sobre una sección de tubería de 4.75km, el USV se configuró con un sistema multihaz R2Sonics Dual Head, perfil de velocidad de sonido Valeport SWiFT y Applanix POSMV OceanMaster para rumbo, actitud del vehículo, tirón y velocidad.
El éxito del proyecto Miller llevó a BP a encargar el mismo sistema para el despliegue en el Mar Caspio en Azerbaiyán para la inspección de cientos de kilómetros de tuberías de aguas poco profundas (12-25 m de profundidad). “La industria offshore está en la cúspide de un gran cambio a medida que aumenta el uso de USV y se desarrollan las funcionalidades. Está desafiando el uso de embarcaciones tripuladas para inspecciones de rutina ”, dice Primeau. "El USV se está convirtiendo en una herramienta estándar para realizar estudios de fondos marinos de alta resolución y también es una puerta de entrada para desarrollar sistemas submarinos complementarios, como la integración de ROV y AUV".
Shell también ha estado analizando los USV, dice Shand, probando un XOCEAN XO-450 a lo largo de la costa al norte de Aberdeen en una breve encuesta de prueba en 2019. Aquí, aunque los datos y el ancho de banda serán un desafío, la implementación de 5G y el uso de la nube ayudará, abriendo la puerta a la inspección y análisis en tiempo real, dice.
Equinor también ha estado utilizando USV para encuestas de oleoductos. En septiembre de 2019, XOCEAN completó encuestas de tuberías para Equinor frente a la costa este de Inglaterra y la costa norte de Alemania. Utilizando MBES, se inspeccionaron cuatro tuberías con un total de 120 millas de longitud en una profundidad de agua de 2 a 40 metros, en profundidades de agua de 2 a 40 metros, dijo XOCEAN. Otro operador de buques de USV, 4D Ocean, realizó encuestas de bajura para Equinor a principios de este año con un MBES montado en el casco.
XOCEAN también ha hecho lo que se afirma es el primer estudio de tubería de protección catódica de alambre de arrastre (TWCP) desde un USV, también en septiembre de 2019. Esto involucró encuestas de TWCP, con sonar multihaz, para el Grupo PX en tuberías de hasta 9 km de la costa cerca de Shetland y frente a la costa de Aberdeenshire. PX Group opera y mantiene, para North Sea Midstream Partners, la Terminal de Gas de St Fergus y Frigg UK asociado y las tuberías mar adentro del Sistema de Exportación de Gas Regional de las Islas Shetland (SIRGE) que conectan las instalaciones de Aberdeenshire con el Mar del Norte.
 (Imagen: Shell)
(Imagen: Shell)
Combinando USV con AUV
Sin embargo, los sensores a bordo de los USV solo llegarán tan profundo. Si las encuestas de tuberías de agua más profundas tienen que ver con los USV, se necesita un enfoque alternativo. Eso significa desplegar un AUV desde un USV, y eso es exactamente lo que Swire Seabed ha estado haciendo por Equinor, en Noruega. En octubre de 2018, en el primero de dos proyectos, implementó un AUV Kongsberg Hugin con un pequeño recipiente de superficie que le permitió mantener las actualizaciones de posición y la comunicación con un control desde Bergen. Las inspecciones se realizaron en tres tuberías entre Kollsnes (una planta en tierra) y Troll A (a solo 65 km de Bergen). En total, se inspeccionaron 180 km de tubería en dos inmersiones de AUV con sonar de apertura sintética batimétrica y datos de imagen HD adquiridos para verificar la integridad de las tuberías submarinas.
En julio de 2019, Swire reclamó la "primera inspección de tuberías en alta mar totalmente no tripulada 'en el horizonte'", inspeccionando hasta 100 km de la costa, nuevamente para Equinor. Esto vio un Hugin con MBES, un sonar de barrido lateral y un sistema de cámara CathX, usado en conjunto con un SEA-KIT Maxlimer USV, fabricado por la firma británica Hushcraft. Se inspeccionaron cuatro tuberías, con un total de 175 km de longitud, nuevamente utilizando sonar batimétrico, de apertura sintética y datos de imágenes HD. El uso del SEA-KIT Maxlimer significaba que el Hugin podía permanecer en el mar haciendo la encuesta por más tiempo, atracando en el mar en el USV para recargar, así como también usarlo como un enlace de comunicaciones y control para el centro remoto en Bergen. Swire dice que al usar un pequeño buque no tripulado, el uso de combustible y las emisiones de carbono se reducen en un 95%. Tom Glancy lo expresa de otra manera: poner a las personas en alta mar se reduce al 100%. Su objetivo final es no tener ningún recipiente de superficie.
[Nota del editor: Swire Pacific Offshore (SPO) anunció en noviembre que cerrará su filial Swire Seabed a partir de finales de febrero de 2020 a medida que las empresas de servicios petroleros continúen sintiendo los efectos de la desaceleración de la industria. Los buques actualmente administrados por Swire Seabed serán operados y comercializados como parte de la flota SPO con sede en Singapur.]
 El SEA-KIT aloja un AUV Hugin para la operación remota de tuberías. (Foto: fondo marino Swire)
El SEA-KIT aloja un AUV Hugin para la operación remota de tuberías. (Foto: fondo marino Swire)
Los siguientes pasos
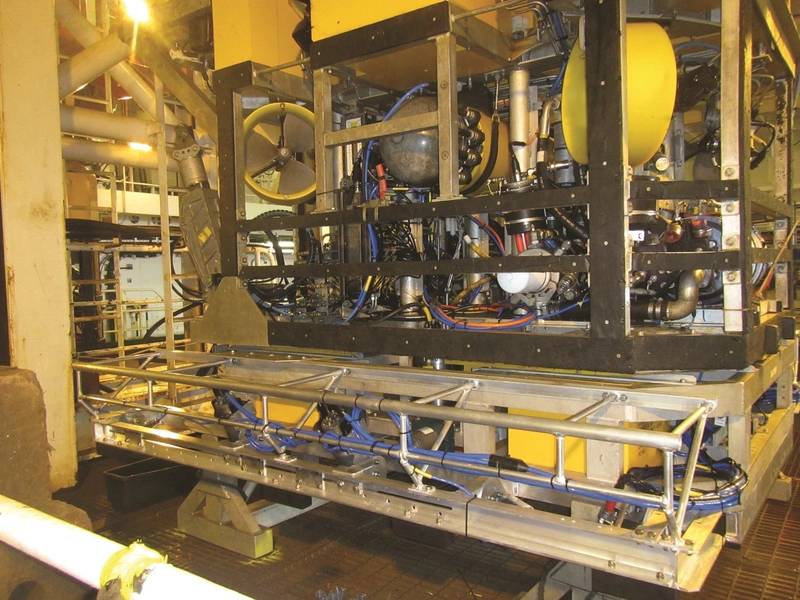
Algunos están trabajando en esto. En 2018, Modus Seabed Intervention desplegó uno de sus HAUV (un AUV Saab Seaeye Sabertooth modificado) en alta mar en el noroeste de Australia para realizar aproximadamente 240 km de levantamiento de tuberías utilizando un perfil láser CathX Scout y una imagen HD distribuida junto con un ecosonda multihaz (MBES). Si bien esto se realizó con el HAUV en una correa desde un barco, para la recopilación de datos en tiempo real, sería posible sin una correa, la empresa, que tiene más proyectos en curso, dice.
El vehículo híbrido Freedom de Oceaneering, aunque muy promocionado con respecto a los vehículos residentes submarinos, en realidad se diseñó inicialmente para una encuesta autónoma de tuberías. El objetivo clave de Oceaneering era tener un vehículo aerodinámico eficiente que pudiera detenerse y realizar trabajos de inspección adicionales, si detectaba una anomalía. De hecho, Steffan Lindsø dijo en un evento de demostración de Drone de intervención submarina cerca de Stavanger en octubre que el primer proyecto del vehículo, en 2020, sería una inspección de la tubería, "probablemente en el Reino Unido".
Kawasaki Subsea también está probando su vehículo de segunda generación, que incorpora el seguimiento de tuberías para la inspección de encuestas, en alta mar en Japón. Este año (2020) llegará a un total para probar el seguimiento de tuberías con DeepStar y la Fundación Nippon. Ha habido una interrupción en el espacio de inspección de la tubería y aún hay más por venir.
Las tecnologías de visión artificial también están ayudando a mejorar la forma en que se proporcionan encuestas de tuberías. i-Tech 7, parte de Subsea 7, es uno de los que ofrece servicios de inspección digital rápida de inspección minuciosa, cada vez más respaldado por la automatización.
 (Foto: i-Tech 7)
(Foto: i-Tech 7)
FDII
Sus servicios de tubería de inspección digital rápida se proporcionan a través de un patín dedicado que se puede enviar y movilizar fácilmente a bordo de cualquiera de los ROV de clase de trabajo en su flota, dependiendo de dónde se requieran los servicios. El patín está equipado con una suite CathX Pathfinder modificada, que tiene tres cámaras de ultraalta definición: puerto, centro y estribor, perfiladores láser y una cámara piloto, sincronizada entre imágenes fijas (una característica de seguridad, para que el LED estroboscópico de alta potencia las luces no influyen en la vista del piloto del ROV).
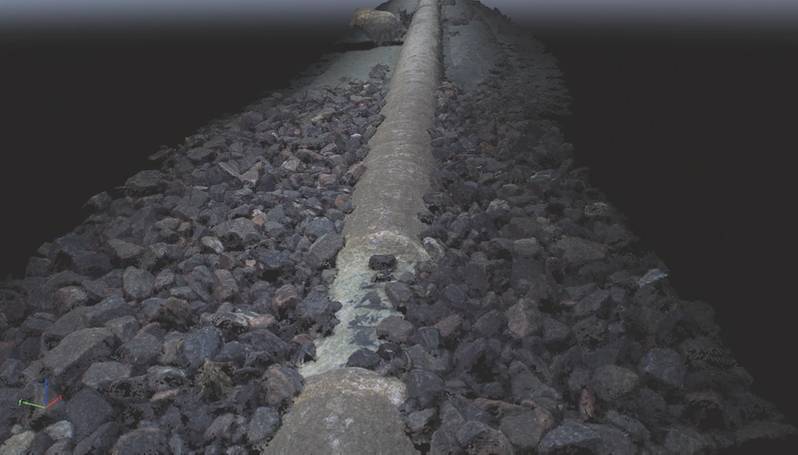
El uso de un conjunto de imágenes digitales como este significa que las encuestas se pueden ejecutar más rápido, a 3-4.5 km / hora, en comparación con las encuestas basadas en video que tradicionalmente se han ejecutado a 1 km / hora para permitir eventos manuales en línea y evitar imágenes borrosas, dice Danny Wake, Jefe de Agrimensura, i-Tech 7. Un proyecto de inspección visual general para BP, en 2018, que cubrió ocho tuberías, con una longitud total de 310 km, más dos inspecciones de estructura, salvó 10 días de buques (que tomaron poco más de 14 días) contra velocidades de inspección de tuberías tradicionales. Se realizaron ahorros equivalentes para la campaña de inspección de ductos FDII 2019 para BP, con el beneficio adicional de contribuir a la reducción de las emisiones de CO2.
Los ingenieros de tuberías también obtienen ortomosaicos y modelos 3D de la tubería que se pueden ubicar espacialmente (en lugar de secuencialmente, como un video). Pero eso no es todo. I-Tech 7 ha estado trabajando con la empresa estadounidense de TI, ciencia y tecnología Leidos en formas de automatizar las rutinas de procesamiento de datos para proporcionar información útil a los ingenieros más rápidamente. Por ejemplo, analizar automáticamente las imágenes para extraer imágenes que contengan posibles eventos, lo que reduce drásticamente la cantidad de imágenes que un humano debe revisar. i-Tech 7 realizó su primera encuesta utilizando estas técnicas este año (2019).
Curiosamente, es una técnica que no se limita a las imágenes digitales. Alrededor del 60% de los algoritmos desarrollados para la inspección digital también funcionarán en video, dice George Gair, Gerente de Inspección Global de i-Tech 7, haciendo un uso más amplio de esta tecnología.
"El santo grial es la clasificación automática y el evento", dice Wake. "Estamos dando pasos hacia eso, ajustando los algoritmos, aumentando la automatización, comenzando con la visión artificial que detecta posibles eventos". El siguiente paso es hacer la detección en vivo, brindando a los ingenieros un acceso más rápido a los resultados de la inspección para que puedan actuar sobre ellos. mas rapido.
 (Imagen: i-Tech 7)
(Imagen: i-Tech 7)
A pesar de la exageración en torno a este tipo de tecnologías, incluido el aprendizaje automático, que utiliza la potencia informática para comparar millones de imágenes y detectar atributos específicos, no es tan fácil, especialmente en una industria que le gusta hacer lo contrario a los diseños estandarizados. Tener los datos de entrenamiento, imágenes de tuberías, también es difícil.
Pero, alrededor del 90-95% de los problemas de integridad de la tubería que se encuentran tienden a estar relacionados con la exposición libre y la exposición al entierro, dice Gair, por lo que este ha sido el enfoque principal de la compañía. El daño, que tiende a ser atípico, llevará más tiempo. También se necesitarán seres humanos en algunas partes del proceso, dice.
En términos de plataforma del vehículo, i-Tech 7 se ha quedado con patines basados en ROV. Si bien el uso de AUV también ayuda a realizar encuestas más rápido, tienden a nadar más alto por encima de la tubería y no necesariamente llevan los paquetes completos de sensores FDII que ofrecen una vista tan completa de la tubería, dice Wake. Si bien se ha enfocado en tener sistemas que puedan detenerse y recopilar más datos si se detecta una anomalía, dice, con los datos de FDII, donde puede ver la tubería desde más ángulos que solo desde arriba en resolución ultra alta, Los ingenieros ya tienen toda la información que podrían necesitar, no tendrían que regresar y hacer una inspección más detallada.
BOEM propone BBG3, la tercera venta de arrendamiento en el Golfo de América

Dolphin Drilling y Vantris firman un acuerdo de comercialización para el semisubmarino Blackford Dolphin
")
Mubadala contrata a SLB para servicios de perforación en aguas profundas en la costa de Indonesia.
-168002 "(Crédito: SLB)")
La alianza Transocean-Valaris creará una importante empresa de perforación offshore de 17 mil millones de dólares con 73 plataformas
")
La Fase 2 de Eni Congo LNG inicia las exportaciones con el primer cargamento de GNL (vídeo)
-167856 "(Crédito: Eni)")
Pozo exploratorio en bloque offshore del Mar Negro se seca
")
La primera turbina se alza imponente en el parque eólico marino estadounidense de 2,6 GW de Dominion Energy
-167623 "(Crédito: Dominion Energy)")
Equinor extiende la estadía del buque de perforación Seadrill frente a Brasil

El campo Sèmè de Akrake comenzará a producir a principios de febrero tras finalizar la perforación
-167415 "Stella Energy 1 MOPU (Crédito: Drydocks World)")
Seadrill consolida su carga de trabajo de perforación offshore con adjudicaciones de contratos multirregionales

-167309 "Buque de perforación West Capella (Crédito: Seadrill)")
Brava Energia comprará participación de Petronas en activos de la Cuenca de Campos por 450 millones de dólares
-167178 "(Crédito: Brava Energia)")
Ulstein Verft lanza el primero de los dos nuevos edificios CSOV de JP Morgan
-166941 "(Crédito: Ulstein Verft)")