Seafloor Crawling Robotics: nuevas herramientas para misiones desafiantes

Figura 1 Crawler de la zona de navegación Sea Otter Surf. Imagen: C-2 Innovations, Inc.

Figura 3: El Sea Ox con un trineo remolcado. Imagen: C-2 Innovations, Inc.
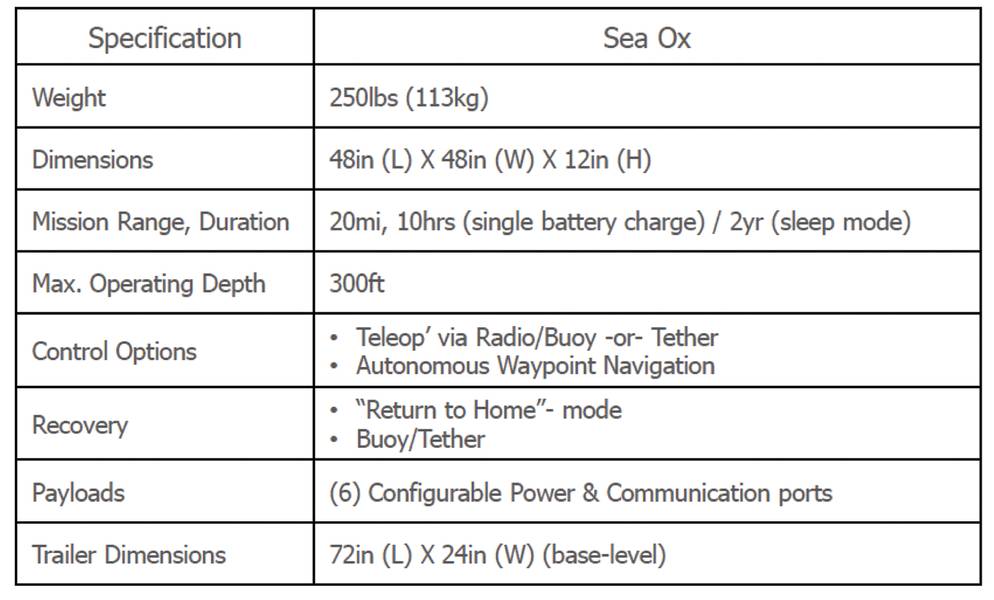

Tabla 1: Especificaciones de Sea Ox. Imagen: C-2 Innovations, Inc.
De vuelta al mar
Se dice ampliamente que la vida comenzó en el océano, y gradualmente se trasladó a la tierra. En el caso de los robots rastreados, esta tendencia se invierte. A principios de la década de 2000, impulsados por importantes demandas de defensa, los robots compactos de tierra se desarrollaron rápidamente. Productos como el PackBot de iRobot y el Talon de Foster-Miller fueron pioneros en robots terrestres de alto rendimiento portátiles. Las exigencias de operar en entornos hostiles hicieron que estas herramientas fueran robustas e inspiraron variantes completamente impermeables. Desafortunadamente, al momento, las limitaciones en el almacenamiento de energía, la autonomía y la telemetría hicieron que los robots de arrastre del lecho marino fueran una novedad en lugar de una herramienta productiva. Esto ha cambiado
A través del surf
En la actualidad, C-2 Innovations, Inc., (C2I) ha desarrollado una familia de robots aptos para la producción, listos para la producción, que se arrastran por el lecho marino para llevar a los usuarios de vuelta a la zona de navegación y al mar. Esta familia incluye el Sea Otter compacto y Sea Ox más grande.
El Sea Otter Surf Zone Crawler (SZC), Figura 1, es un rastreador anfibio inferior de segunda generación totalmente autónomo capaz de operar a profundidades de hasta 100 m a través de regímenes de alta corriente de agua y hacia tierra. Sin una atadura, el sistema puede operar en regiones y corrientes que los sistemas anteriores no podían.
El C-2i Otter puede conducir 16 km bajo el agua o 20 km en tierra, y mantener la estación durante un mes; regresando ya sea en el comando o en un tiempo de espera predispuesto. La capacidad de operar en entornos mixtos es única, mientras que el SZC permite el acceso a áreas que las embarcaciones de superficie, los nadadores o las técnicas basadas en humanos no podrían. El Sea Otter SZC opera con flotabilidad negativa mientras opera en la capa límite de energía más baja. El bajo perfil minimiza aún más el arrastre actual. El vehículo ha funcionado en 1,5 m de profundidad y puede atravesar terrenos blandos que no soportarán cargas humanas. Pruebas recientes demostraron la capacidad de transportar cargas útiles de 40 kg y remolcar un trineo de 45 kg en varias superficies marinas.
Las especificaciones de Otter-SZC incluyen:
• Operación simétrica de doble cara para operar en olas pesadas
• Peso: 45 kg seco, 1 m de largo, 55 cm de ancho y 25 cm de alto (ampliable en longitud y ancho)
• Velocidad: avance o retroceso, variable hasta 1 m / s
• Navegación: IMU de 3 ejes, FOG, codificadores duales, GPS de doble cara y doble frecuencia
• Control: el usuario selecciona control de radio completamente autónomo (preprogramado), de cuerda o de radio
• Batería: Li-ion recargable
• Puertos: puerto de carga, programación del puerto Ethernet, dos puertos Ethernet invitados
El diseño Sea Otter es modular. Los pontones de estribor y lado de babor son piezas de núcleo, pero las holguras de longitud, ancho y suelo se pueden cambiar alargando los soportes del piñón loco o cambiando el puente de conexión. El diseño actual incluye dos puertos de invitado de Ethernet y espacio interno para tarjetas de circuitos adicionales, como adquisición de datos o placas de video.
El diseño modular ha permitido que las cargas útiles con correa se monten en cuestión de minutos, sin importar la forma, el volumen o el peso de la carga útil.
Las cargas útiles han incluido salinidad, turbidez, profundidad de velocidad sónica, varias cámaras, sonar de imágenes, boyas liberables, penetrómetros de suelo y trineos de sensores electromagnéticos, entre otros.
 Figura 2: Patrón de búsqueda de escalera de nutria de mar. Imagen: C-2 Innovations, Inc. Las baterías y todos los componentes electrónicos están incluidos dentro del volumen de la ruta, maximizando el volumen libre para la bahía de carga y minimizando el "tope". La pista ancha produce presiones sobre el suelo de menos de 1,3 kilopascales cuando está seco o 0.43 kilopascales cuando está sumergido. El diseño de la pista puede modificarse para un agarre más agresivo o hacerse más ancho y más largo para reducir el contacto de presión sobre el suelo. Las defensas se agregan para minimizar la turbulencia y el arrastre. La precisión de navegación autónoma se logra al fusionar los datos de un giroscopio de fibra óptica (FOG) de un eje y una unidad de medición inercial de 3 ejes. Un GPS de doble banda recibe una solución cuando sale a la superficie y se usa como una posición de verificación cruzada. Los codificadores de eje en cada lado de la unidad miden la distancia recorrida.
Figura 2: Patrón de búsqueda de escalera de nutria de mar. Imagen: C-2 Innovations, Inc. Las baterías y todos los componentes electrónicos están incluidos dentro del volumen de la ruta, maximizando el volumen libre para la bahía de carga y minimizando el "tope". La pista ancha produce presiones sobre el suelo de menos de 1,3 kilopascales cuando está seco o 0.43 kilopascales cuando está sumergido. El diseño de la pista puede modificarse para un agarre más agresivo o hacerse más ancho y más largo para reducir el contacto de presión sobre el suelo. Las defensas se agregan para minimizar la turbulencia y el arrastre. La precisión de navegación autónoma se logra al fusionar los datos de un giroscopio de fibra óptica (FOG) de un eje y una unidad de medición inercial de 3 ejes. Un GPS de doble banda recibe una solución cuando sale a la superficie y se usa como una posición de verificación cruzada. Los codificadores de eje en cada lado de la unidad miden la distancia recorrida.
Precisamente se han logrado precisiones del 2% del rango total. Turn-in-place (TIP) y los giros de arco se calculan para mantener la precisión de la ruta. La Figura 2 ilustra un patrón de búsqueda de escalera preprogramado a lo largo de Wells Beach en York, Maine. Las pruebas ocurrieron cuando la marea estaba alta y el sistema estaba sumergido (obsérvese que la foto está en bajamar).
Además de Sea Otter, una variante más grande está disponible. El Sea Ox es un rastreador de fondo submarino versátil diseñado para mapear y muestrear el fondo del océano. Al igual que el Sea Otter, el diseño modular permite un fácil transporte, almacenamiento e implementación. El sistema está diseñado para operar de manera autónoma o por medio de un comando de RF. El Sea Ox mide 122 x 122 x 30 cm en la configuración estándar, pero se puede extender rápidamente para aumentar el alcance o la capacidad de remolque. Como se muestra en la Figura 3, el Sea Ox tiene un alcance submarino de 32 km, que se puede ampliar mediante la adición de paquetes de baterías a 64 millas. El peso total del tractor es de 113 kg y puede ser lastrado a 230 kg si se trabaja en olas altas.
El Sea Ox fue diseñado originalmente para remolcar un trineo de instrumentación que incorporaba bobinas gemelas de inducción electromagnética (EMI) diseñadas por White River Technologies, Inc. El trineo de 60 x 180 cm pesa 30 kg, incluida la instrumentación. Sin preocuparse por consideraciones de flotabilidad o volumen, Sea Ox y su trineo se han utilizado para atornillar paquetes adicionales de instrumentación del cliente como CTD, oxígeno disuelto (DO), registradores sónicos, generadores de imágenes acústicas y perfiladores de corriente Doppler acústicos (ADCP). . En desarrollo se encuentra un sistema de extracción de muestras con múltiples disparos para recuperar muestras físicas del entorno del fondo marino.
Dos aplicaciones convincentes
Los robots que se arrastran por el suelo marino no son simples novedades; Permiten muchas aplicaciones críticas. La naturaleza anfibia de Sea Ox permite la operación en tierra, a través e incluyendo la zona de transición a una profundidad de 100 m. Un perfil bajo de 30 cm reduce el arrastre al operar en la capa límite de suelo / agua de menor velocidad, y le permite operar discretamente bajo el tráfico de superficie. La vía ancha crea una presión sobre el suelo extremadamente baja de 0.0186 bar que puede transitar por un terreno extremadamente blando, que es un orden de magnitud menor que el de los humanos. Con un rango submarino de 16 km (más de 32 km de superficie), puede inspeccionar playas enteras en un solo día. La modularidad del Sea Ox permite que sea transportado a mano a través de áreas de playa sensibles y puede ser lanzado y recuperado por una sola persona desde la costa; reduciendo el costo de las encuestas a una fracción de los sistemas convencionales donde los costos logísticos pueden exceder el peso de la operación real. Algunas aplicaciones recientes han demostrado este potencial.
Remediación de UXO
El Sea Ox es una plataforma de movilidad inferior portátil para investigaciones de MUSE en las regiones de transición, surfeo y aguas poco profundas. Financiado por el Programa de Certificación de Tecnología de Seguridad Ambiental (ESTCP), el programa de demostración y validación de la tecnología ambiental del Departamento de Defensa, el Sea Ox demostró:
• Un diseño de bajo perfil que permite que el sistema opere en la zona límite minimizando la exposición a las corrientes y minimizando el impacto de arrastre y de las olas.
• Un potente y modular diseño liviano que permite el ajuste de la huella y el balasto para acomodar el tránsito a través de suelos de baja presión y suciedad a la vez que proporciona tracción para tirar de los trineos de instrumentación
• Modularidad y ensamblaje en el sitio que permite el transporte de un solo hombre a través de terrenos ambientalmente sensibles o difíciles
• Mínimo ruido electromagnético autogenerado (EM) y ruido acústico que minimiza la interferencia de los instrumentos
En esta misión, Sea Ox remolcó un conjunto de detectores marinos Flex-EM de White River Technologies, Inc. (WRT). Los objetivos del proyecto fueron:
• Evaluar la capacidad de realizar investigaciones geofísicas integradas a través de paquetes de instrumentación remolcados y transportados a través de una gama de estados del terreno y del mar
• Desarrollar estrategias de maniobra con un paquete de remolque
• Determinar mapeo, precisión de cobertura
• Evaluar las ventajas operacionales del diseño modular más pequeño
• Mostrar la rentabilidad total del ciclo de vida, incluida la movilización y la desmovilización, la modificación específica del vehículo en el lugar para el soporte del medio ambiente y de la carga útil, recuperación y mantenimiento y reparación del vehículo atascado
Estos fueron logrados. El Sea Ox más capaz es modular con un solo conjunto de herramientas y un peso máximo de 25 kg. Puede proporcionar hasta un año completo de mantenimiento de la estación para la caracterización de sitios múltiples, de despliegue automático diurno y estacional.
Y hacia adelante. . .
Los rastreadores del suelo marino son una categoría emergente de robótica submarina. Gracias a la tecnología de componentes mejorada, estas herramientas ahora ofrecen un rendimiento útil. Para una encuesta sostenida y precisa a través de la zona de oleaje, ahora existen plataformas robóticas viables que nos llevan de regreso al mar.
BOEM propone BBG3, la tercera venta de arrendamiento en el Golfo de América

Dolphin Drilling y Vantris firman un acuerdo de comercialización para el semisubmarino Blackford Dolphin
")
Mubadala contrata a SLB para servicios de perforación en aguas profundas en la costa de Indonesia.
-168002 "(Crédito: SLB)")
La alianza Transocean-Valaris creará una importante empresa de perforación offshore de 17 mil millones de dólares con 73 plataformas
")
La Fase 2 de Eni Congo LNG inicia las exportaciones con el primer cargamento de GNL (vídeo)
-167856 "(Crédito: Eni)")
Pozo exploratorio en bloque offshore del Mar Negro se seca
")
La primera turbina se alza imponente en el parque eólico marino estadounidense de 2,6 GW de Dominion Energy
-167623 "(Crédito: Dominion Energy)")
Equinor extiende la estadía del buque de perforación Seadrill frente a Brasil

El campo Sèmè de Akrake comenzará a producir a principios de febrero tras finalizar la perforación
-167415 "Stella Energy 1 MOPU (Crédito: Drydocks World)")
Seadrill consolida su carga de trabajo de perforación offshore con adjudicaciones de contratos multirregionales

-167309 "Buque de perforación West Capella (Crédito: Seadrill)")
Brava Energia comprará participación de Petronas en activos de la Cuenca de Campos por 450 millones de dólares
-167178 "(Crédito: Brava Energia)")
Ulstein Verft lanza el primero de los dos nuevos edificios CSOV de JP Morgan
-166941 "(Crédito: Ulstein Verft)")