Los buenos vehículos submarinos vienen en paquetes pequeños
-109905 "El Riptide AUV (Credit BAE Systems)")
El Riptide AUV (Credit BAE Systems)
-109906 "Un Trident ROV (Crédito SOFAR Ocean)")
Un Trident ROV (Crédito SOFAR Ocean)
")
RangerBot sobre un arrecife (Crédito Matthew Dunbabin / QUT)
La temporada de vacaciones acaba de pasar, y muchos pueden haber escuchado la frase, "las cosas buenas vienen en paquetes pequeños". ¿Es esto cierto para los vehículos submarinos de hoy? De hecho lo hace. Una de las tendencias recientes más llamativas en el campo es la proliferación de vehículos submarinos compactos y asequibles, pero altamente efectivos. La última década ha visto nuevos vehículos operados a distancia (ROV) y vehículos submarinos autónomos (AUV) producidos que son transportados y desplegados fácilmente por una sola persona. Aprovechando los desarrollos en circuitos, sensores y baterías inspirados en el sector de la electrónica de consumo, estos pequeños vehículos superan su clase de peso en aplicaciones prácticas.
Hay muchos ejemplos de ROV y AUV que uno podría considerar, pero vale la pena revisar una selección de cuatro como ejemplos de la categoría. También ofrecen perspectivas contrastantes sobre algunas opciones técnicas y operativas clave. Para los ROV, el Sofar Ocean Trident representa quizás el pináculo del rendimiento compacto y la optimización del diseño. Mientras que Blue Robotics acertadamente llamado BlueROV presenta una opción más flexible. En los vehículos aéreos no tripulados, el micro vehículo Riptide de BAE Systems demuestra el enfoque "clásico" de alta ingeniería, aunque con una perspectiva de software muy flexible. Un nuevo participante de la Universidad Tecnológica de Queensland, el RangerBot, presenta un nuevo cambio de paradigma para mantener bajos los costos para casos de uso específicos.
Comenzando con los ROV, el BlueROV de Blue Robotics presenta un factor de forma de ROV típico. Diseñado como un ROV de trabajo o investigación más grande, el vehículo tiene un bastidor abierto que lleva los gabinetes de la electrónica y la batería, los propulsores, la espuma de flotación y los pesos de lastre. Este diseño simple es robusto, ampliable y completamente familiar para el campo. El sistema ofrece configuraciones de seis y ocho hélices, muchos accesorios opcionales y un rendimiento y flexibilidad significativos. Pero el enfoque novedoso para la reducción de costos y la gestión de la complejidad hacen de esto un cambio de juego.
Para mantener bajos los costos, el BlueROV se envía parcialmente ensamblado, lo que requiere un estimado de seis a doce horas de ensamblaje del usuario para completar. Si bien esto es un ahorro de costos para el comprador, también brinda a los clientes la oportunidad de comprender los componentes y la arquitectura del sistema. Esto admite una herramienta destinada a modificaciones y actualizaciones del usuario final. El vehículo aprovecha las tecnologías de drones comunes y emplea el firmware de control ArduSub de código abierto, que ofrece características útiles y una amplia comunidad de usuarios. El operador controla el ROV con una computadora portátil y un controlador de juegos. La aplicación QGroundControl de código abierto proporciona la interfaz de usuario. Esta potente combinación de tecnología se ofrece a un precio de entrada notablemente bajo de $ 3,500. Esto trae un ROV verdaderamente capaz a una audiencia nueva e importante.
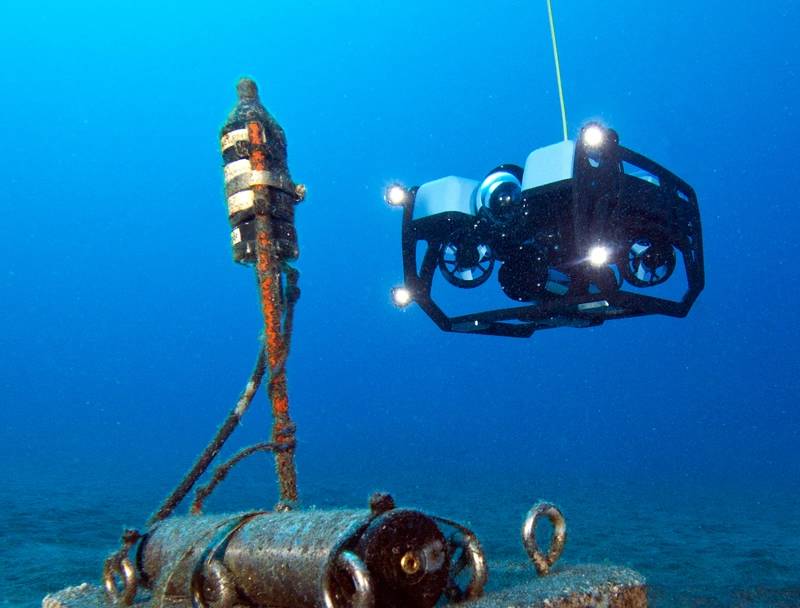 Un BlueROV (Credit Blue Robotics, Jeff Milisen) También expandiendo la audiencia para los ROV es el Trident de Sofar Ocean, anteriormente OpenROV. Este ROV compacto es un caso de estudio en optimización de ingeniería. Su factor de forma y arquitectura son una evolución significativa de otros ROV con baterías. Trident tiene un diseño único que combina la versatilidad y el control de un ROV (vehículo operado de forma remota) y la eficiencia de un AUV (vehículo autónomo submarino). Puede realizar transectos lineales extendidos y maniobras complejas en espacios reducidos. Usando solo tres propulsores, en una configuración de compensación única, el ROV puede avanzar de manera eficiente pero maniobrar con mucha delicadeza. El propulsor vertical descentrado del ROV puede hacer que se incline a altas velocidades, pero también se mueva o cambie la profundidad sin inclinarse mientras opera a bajas velocidades, similar a la forma en que funciona un ROV tradicional. Además de un elegante diseño hidrodinámico, Trident fue diseñado para ser altamente portátil y bastante duradero. El ROV es lo suficientemente pequeño como para caber en una mochila, mientras que sus paneles laterales están moldeados con un revestimiento de goma que le da una forma de parachoques. La interfaz de usuario se basa en estándares de Internet como HTML5 y WebGL para permitir el pilotaje a través de un navegador que se ejecuta en computadoras portátiles, tabletas y dispositivos móviles. La adopción de los enfoques modernos de software de código abierto asegura que la base del código pueda ser actualizada continuamente tanto por la comunidad como por la empresa. Esto permite cambios de software impulsados por el usuario, como nuevas interfaces de usuario para dar forma a la experiencia operativa y la entrega de capacidades mejoradas de ROV a la comunidad global de Trident.
Un BlueROV (Credit Blue Robotics, Jeff Milisen) También expandiendo la audiencia para los ROV es el Trident de Sofar Ocean, anteriormente OpenROV. Este ROV compacto es un caso de estudio en optimización de ingeniería. Su factor de forma y arquitectura son una evolución significativa de otros ROV con baterías. Trident tiene un diseño único que combina la versatilidad y el control de un ROV (vehículo operado de forma remota) y la eficiencia de un AUV (vehículo autónomo submarino). Puede realizar transectos lineales extendidos y maniobras complejas en espacios reducidos. Usando solo tres propulsores, en una configuración de compensación única, el ROV puede avanzar de manera eficiente pero maniobrar con mucha delicadeza. El propulsor vertical descentrado del ROV puede hacer que se incline a altas velocidades, pero también se mueva o cambie la profundidad sin inclinarse mientras opera a bajas velocidades, similar a la forma en que funciona un ROV tradicional. Además de un elegante diseño hidrodinámico, Trident fue diseñado para ser altamente portátil y bastante duradero. El ROV es lo suficientemente pequeño como para caber en una mochila, mientras que sus paneles laterales están moldeados con un revestimiento de goma que le da una forma de parachoques. La interfaz de usuario se basa en estándares de Internet como HTML5 y WebGL para permitir el pilotaje a través de un navegador que se ejecuta en computadoras portátiles, tabletas y dispositivos móviles. La adopción de los enfoques modernos de software de código abierto asegura que la base del código pueda ser actualizada continuamente tanto por la comunidad como por la empresa. Esto permite cambios de software impulsados por el usuario, como nuevas interfaces de usuario para dar forma a la experiencia operativa y la entrega de capacidades mejoradas de ROV a la comunidad global de Trident.
Este paquete de alto rendimiento y fácil de usar está disponible en Amazon con un precio de $ 1,700. Es realmente una nueva era para robots oceánicos accesibles y útiles. Aquellos que buscan una experiencia ligada pueden seleccionar un sistema altamente optimizado o un enfoque modular con más capacidad de configuración para el usuario final. En cualquier caso, por el costo de una computadora portátil o PC moderna, uno puede estar completamente equipado para participar en misiones significativas en profundidades de agua de hasta 100 metros. Aquellos dispuestos a "cortar el cordón" tienen opciones adicionales.
Los AUV efectivos se han vuelto más pequeños y más asequibles en los últimos años. Al igual que con sus primos ROV, hay varios ejemplos a considerar. El moderno "micro" AUV quizás esté mejor asociado con los productos de BAE Systems, anteriormente Riptide Autonomous Solutions. Riptide es una historia de vehículos pequeños y rápido crecimiento. Fundada en 2015, Riptide entregó rápidamente una oferta compacta de AUV.
El primer producto de Riptide fue el micro-UUV, un vehículo submarino autónomo de código abierto altamente flexible que proporcionó una solución de vanguardia y de bajo costo muy adecuada para desarrolladores de autonomía y comportamientos, sensores submarinos y otras nuevas cargas útiles. El micro-UUV presentaba interfaces abiertas de hardware y software que brindaban a los usuarios una plataforma confiable y robusta para avanzar en el desarrollo tecnológico. El diseño del vehículo fue optimizado para una alta eficiencia con la mejor firma hidrodinámica de su clase. La base micro-UUV tiene 4 7/8 pulgadas de diámetro, 40 pulgadas de largo y pesa 22 libras. El sistema estándar está clasificado para una profundidad de 300 metros.
Si bien este vehículo puede parecer una industria "típica", su oferta se diferencia por algo más que su pequeño tamaño. El enfoque en las necesidades del usuario final fue más frecuente en el diseño de software. A diferencia de las arquitecturas propietarias típicas, el micro-UUV presentaba una arquitectura flexible que aprovechaba una gran cantidad de software de código abierto. En el lanzamiento inicial del software micro-UUV, Riptide ofreció código para las plataformas de desarrollo Arduino y Beaglebone Black, así como soporte para el motor de control del robot MOOS-IvP. Este fue un poderoso conjunto de características para cualquier AUV. A un precio inicial de alrededor de $ 15,000 hubo un interés significativo en el mercado.
Para 2019, BAE Systems observó el éxito de este producto. La organización BAE Systems FAST Labs adquirió Riptide y ahora está madurando la tecnología de plataforma y la fabricación a escala. FAST Labs es el brazo de I + D de BAE Systems, Inc. y es único en el
industria de defensa como un negocio interno de I + D financiado por el cliente diseñado para
colaborar en toda la empresa global de la compañía para desarrollar y realizar la transición de tecnologías avanzadas. El micro AUV lanzado originalmente por Riptide se está beneficiando de este proceso.
Otro pequeño AUV que recientemente apareció en escena es el RangerBot. Este vehículo adopta un enfoque diferente para ofrecer una solución asequible para los usuarios finales. El RangerBot fue diseñado por ingenieros de la Universidad Tecnológica de Queensland (QUT) en Brisbane, Australia. El equipo de QUT trabaja en un centro de robótica enfocado en visión artificial. También trabajan para apoyar evaluaciones ambientales en la Gran Barrera de Coral. Se habilitó un cambio de paradigma clave cuando el equipo, reconociendo que las condiciones del agua en su entorno objetivo eran muy claras, eligió emplear exclusivamente sensores basados en la visión.
 RangerBot sobre un arrecife (Crédito Matthew Dunbabin / QUT) Esto tal vez suena obvio, pero al abandonar el tamaño, la potencia y, sobre todo, las penalizaciones de costos de los instrumentos acústicos, RangerBot se hizo más pequeño, más fácil de usar y más asequible que las alternativas típicas. Usando una serie de cámaras, el RangerBot puede administrar su curso horizontal sobre la parte inferior, así como su profundidad. Utilizando las últimas herramientas de mosaico de fotos, el vehículo también puede producir productos de datos útiles en un sitio de encuesta. Los sistemas visuales también permiten aplicaciones complejas de gestión ambiental. RangerBot, y sus prototipos predecesores, han demostrado ser capaces de identificar la estrella de mar corona de espinas (COTS), un depredador que puede devastar los arrecifes de coral. Los AUV también han demostrado la capacidad de transportar una carga útil que puede eliminar los COTS mediante la inyección precisa de una solución que solo daña el organismo invasivo. La interfaz de carga útil que admite esta misión también está ayudando con la restauración de arrecifes. Se puede instalar una vejiga de hasta 8 litros de larvas de coral en el RangerBot. Usando sus capacidades de visión automatizada, el AUV puede identificar espacios desnudos adecuados en un arrecife degradado y depositar la concentración adecuada de larvas. Por lo tanto, un RangerBot completamente cargado puede sembrar aproximadamente 250 metros cuadrados de arrecife. Esto es más eficiente que las técnicas anteriores basadas en buzos.
RangerBot sobre un arrecife (Crédito Matthew Dunbabin / QUT) Esto tal vez suena obvio, pero al abandonar el tamaño, la potencia y, sobre todo, las penalizaciones de costos de los instrumentos acústicos, RangerBot se hizo más pequeño, más fácil de usar y más asequible que las alternativas típicas. Usando una serie de cámaras, el RangerBot puede administrar su curso horizontal sobre la parte inferior, así como su profundidad. Utilizando las últimas herramientas de mosaico de fotos, el vehículo también puede producir productos de datos útiles en un sitio de encuesta. Los sistemas visuales también permiten aplicaciones complejas de gestión ambiental. RangerBot, y sus prototipos predecesores, han demostrado ser capaces de identificar la estrella de mar corona de espinas (COTS), un depredador que puede devastar los arrecifes de coral. Los AUV también han demostrado la capacidad de transportar una carga útil que puede eliminar los COTS mediante la inyección precisa de una solución que solo daña el organismo invasivo. La interfaz de carga útil que admite esta misión también está ayudando con la restauración de arrecifes. Se puede instalar una vejiga de hasta 8 litros de larvas de coral en el RangerBot. Usando sus capacidades de visión automatizada, el AUV puede identificar espacios desnudos adecuados en un arrecife degradado y depositar la concentración adecuada de larvas. Por lo tanto, un RangerBot completamente cargado puede sembrar aproximadamente 250 metros cuadrados de arrecife. Esto es más eficiente que las técnicas anteriores basadas en buzos.
Inspirados por estos exitosos esfuerzos de investigación, el equipo de QUT ha optimizado el diseño de RangerBot para la producción y se está preparando para apoyar un esfuerzo de comercialización. Cuando esta variante de producto llegue al mercado, ofrecerá una solución poderosa que combina la eficiencia de natación libre de AUV con niveles de maniobrabilidad de ROV, así como capacidades avanzadas de inspección y reconocimiento. La advertencia aquí es que la claridad del agua debe ser lo suficientemente alta para que la tecnología visual funcione. Pero hay muchos entornos operativos de este tipo en el océano global.
Los ejemplos presentados aquí se ofrecen para validar la afirmación de que "los buenos vehículos submarinos vienen en paquetes pequeños". Los usuarios de ROV y AUV pueden encontrar muchas opciones, incluso más allá de los sistemas discutidos aquí. Las tendencias subyacentes a estos desarrollos incluyen una mayor adopción de software de código abierto, herramientas de producción modernas y beneficios de costos de otros campos, en particular la electrónica de consumo. El impacto del pensamiento innovador y el diseño de hojas limpias también es notable. Los vehículos descritos aquí, y muchas otras ofertas compactas en el campo, se benefician del pensamiento de individuos u organizaciones que son nuevos en el sector. Liberarse de las tecnologías más antiguas, o conceptos de diseño, parece ser una gran idea para la comunidad de vehículos submarinos más pequeña.
Inversores nórdicos a la UE: Descarten la idea de perforar en el Ártico.

Karoon reinicia la producción en un yacimiento brasileño tras la revisión de la plataforma flotante de producción, almacenamiento y descarga (FPSO).
 en el campo de Baúna (Crédito: Karoon Energy)")
Wilson inicia la fabricación de la superestructura para la plataforma flotante de producción, almacenamiento y descarga (FPU) Sakarya de aguas profundas de Turquía.
-170704 "(Crédito: Wilson New Energies)")
Eco Atlantic impulsa su expansión en alta mar en las Islas Malvinas con un acuerdo con JHI.
-Oil-amp-Gas)
-170668 "(Crédito: Eco (Atlantic) Oil & Gas)")
ADES se adjudica un contrato de 48 millones de dólares en Nigeria para la plataforma petrolífera Main Pass IV.
")
Turquía se prepara para su primera licitación de energía eólica marina, ya que 2026 se perfila como el "Año del Viento".
")
QatarEnergy, TotalEnergies y ConocoPhillips se asocian para un bloque en alta mar en Siria.
-170532 "(Crédito: QatarEnergy)")
Ørsted y PGE instalan los primeros cimientos en el parque eólico marino Baltica 2 de Polonia.
-170484 "(Crédito: Van Oord)")
Amplitude Energy obtiene la licencia de producción para el yacimiento de gas Annie, frente a las costas de Australia.
-170410 "(Crédito: Amplitude Energy)")
Noruega añade 70 bloques marinos en la nueva ronda de licencias de petróleo y gas.
")
La tecnología como facilitadora de la seguridad energética en Asia marítima

Desmantelamiento de pozos: Ampliando horizontes para innovadores con experiencia comprobada.
-170109 "(Crédito: Odfjell Technology)")