Residencia en espera
")
Durante mucho tiempo ha sido una visión tener vehículos submarinos capaces de soportar operaciones submarinas sin depender de un buque de superficie. Estamos más cerca de esta visión que nunca antes, pero ¿qué hay de nuevo que no existía antes para que esto suceda?
A principios de este año se alcanzó un hito en los vehículos submarinos en el negocio del petróleo y el gas. Un vehículo subacuático autónomo (AUV) acopló, cargó y descargó datos de forma inalámbrica, todo de forma inductiva, con control automático remoto y control visual en vivo durante una demostración en un lago en Suecia. El muelle era la estación de acoplamiento submarina de estándar abierto (SDS) de Equinor y el vehículo era el Sabertooth de Saab Seaeye.
Es un paso para que los vehículos residan permanentemente bajo el agua y se realizarán más demostraciones a medida que otros pongan a prueba sus nuevos vehículos. Pero, algunos dirán que hemos estado aquí antes; Esto se intentó en la década de 1990. ¿Qué hay de nuevo? Es una combinación de fuerzas: impulsadas por el mercado y la tecnología.
Para Gro Stakkestad, gerente de intervención submarina y reparación de tuberías, en Equinor, es una combinación de la desaceleración, un impulso para la automatización y una mayor conciencia ambiental. Steffan Lindsø, Director de Tecnología Emergente, Europa, en Oceaneering, dice que las comunicaciones en alta mar han sido el componente principal que falta, así como los avances en las tecnologías de batería y navegación, mientras que Sean Halpin, Director, Gestión de Productos y Marketing, en el nuevo entrante Houston Mechatronics, dice que la reducción de costos y el acceso a la potencia informática son grandes impulsores. Los movimientos hacia toda la infraestructura del campo eléctrico también ayudarán.
La pieza final
Para Jan Siesjö, ingeniero jefe de Saab Seaeye, reunir el acoplamiento, la carga y la descarga de datos fue la pieza final del rompecabezas para llevar esta capacidad al campo. Pero, ha habido muchos otros trabajos en segundo plano, en gran parte en torno a las capacidades de control remoto.
“El control remoto a largas distancias puede parecer simple, pero para que sea confiable necesita muchas cosas en su lugar. No es solo enviar comandos a través de Internet, es tener sistemas que pueden mantenerse seguros, pueden mantenerse para que no salgan mal y si algo sale mal no es tan complejo que necesita un ingeniero universitario para solucionarlo ". incluye el mantenimiento de la estación, la navegación del waypoint y la evitación de obstáculos
En el lado de las comunicaciones, Saab Seaeye ha estado trabajando con Boeing, ejecutando un vehículo subacuático (ROV) de clase de trabajo ligero Leopard sobre un enlace satelital a través de los EE. UU., Realizando trabajos de manipulación, conectores de acoplamiento, misiones de vuelo, control de puntos de referencia, etc. " Tuvimos algunas limitaciones bastante estrictas, solo 1 mb / s, y una latencia que presionamos hasta tres segundos e intencionalmente estropeamos la calidad de los datos ”, dice Siesjö. “A pesar de eso, pudimos acoplar conectores de cable volador y hacer muchas otras cosas. El objetivo a más largo plazo es sacar un ROV de un AUV muy grande y realizar el trabajo de intervención de varias maneras ".
 Sabertooth de Saab Seaeye, que demostró la carga inductiva y la descarga de datos en Suecia a principios de este año. (Foto: Saab Seaye)
Sabertooth de Saab Seaeye, que demostró la carga inductiva y la descarga de datos en Suecia a principios de este año. (Foto: Saab Seaye)
Trabajar en profundidad es otro desafío, tanto llegar a un sitio como mantener enlaces de comunicaciones. A principios de este año, Saab Seaeye probó este escenario, haciendo pruebas de tres semanas en 2.400 metros de profundidad en el Mediterráneo, atado y autónomo, con una comunicación y posicionamiento 100% exitosa del vehículo, incluso con un empuje total de hasta 4 nudos, dice Siesjö. El trabajo en estas profundidades incluyó determinar cómo viajar a un sitio de trabajo de manera eficiente (2.400 metros es un largo camino hacia abajo) mientras se mantiene el posicionamiento, utilizando una combinación de sistema de navegación inercial (INS) y posicionamiento de línea de base ultracorta (USBL).
Saab Seaeye está apoyando su trabajo con simuladores de alta fidelidad (como los utilizados para probar los aviones de combate de su empresa matriz), por lo que puede ejecutar todos los sistemas de control autónomos y humanos con su software de control nativo y averiguar si funcionan - Mucho antes de que entren al agua.
Además, está trabajando en cómo los vehículos pueden construir, en tiempo real, mapas 3D del entorno en el que se encuentran mediante el uso de un sistema de cámara estéreo para realizar localización y mapeo 3D simultáneo (SLAM). Esto permitirá que el vehículo navegue y mida lo que ve en relación a sí mismo. Saab Seaeye ha estado probando esta capacidad desde 2018, construyendo nubes 3D del mundo submarino.
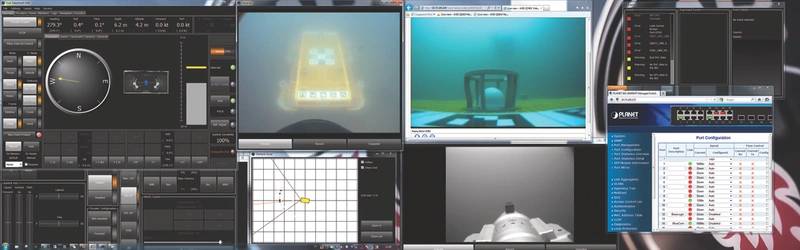 Con controles remotos avanzados fáciles de usar, se demostró el acoplamiento, con una transmisión de video en vivo a la costa. (Imagen: Saab Seaye)
Con controles remotos avanzados fáciles de usar, se demostró el acoplamiento, con una transmisión de video en vivo a la costa. (Imagen: Saab Seaye)
Geosub a AIV
Otra compañía que ha estado desarrollando esta capacidad durante algún tiempo es Subsea 7. En la década de 1990, estaba detrás de Geosub, una tecnología con licencia de Subsea 7 del Centro Nacional de Oceanografía (NOC). Su objetivo principal era la inspección autónoma de tuberías, utilizando la navegación de puntos de referencia y el seguimiento automático para aumentar la calidad y la eficiencia de la recopilación de datos de los fondos marinos y reducir el soporte de los buques de superficie. Si bien fue un éxito en términos de calidad de datos, aún tuvo que ser lanzado y recuperado de una embarcación y necesitaba soporte de superficie para el posicionamiento. Tampoco podía hacer mediciones de protección catódica, por lo que era limitado.
Subsea 7, a través de su negocio i-Tech 7, ha avanzado y ahora tiene su vehículo de inspección autónomo (AIV), que es fundamental para la capacidad de reubicación, desarrollado bajo su precursor, el Prototype AIV, para que no necesite una posición regular actualizaciones de un recipiente de superficie. "El desarrollo se desencadenó por la decisión de pasar a vehículos flotantes autónomos, centrando la capacidad en la inspección de infraestructura submarina en el campo. Como el objetivo ahora se enfocaba en inspeccionar el equipo existente, el equipo en sí podría ser rastreado para proporcionar las posiciones de alta precisión necesarias para la navegación sin actualizaciones de una embarcación de superficie ”. Es similar al rastreador automático, pero en 3D y podría describirse como una forma de GOLPE.
El AIV también tiene su propio sistema de atraque submarino, que desconecta las operaciones de lanzamiento y recuperación de los buques. "La introducción de la planificación simplificada de la misión, vinculada a la reubicación de la navegación con motor y un proceso en el que el AIV podía autoengancharse a la canasta, efectivamente rompió el vínculo con la dependencia del buque", dice Jamieson.
 Las operaciones remotas también se realizan con ROV. Este es el centro de control en tierra de i-Tech 7 para operaciones de ROV. (Foto: i-Tech 7)
Las operaciones remotas también se realizan con ROV. Este es el centro de control en tierra de i-Tech 7 para operaciones de ROV. (Foto: i-Tech 7)
Atraque estandarizado
Equinor ha dado un gran impulso en esta área al impulsar una visión de "drones de intervención submarina" (UID), como se les llama, y adjudicar contratos, incluso para el diseño de una SDS de estándar abierto que cualquier vehículo puede usar . El diseño SDS incorpora conectores inductivos de las marcas Blue Logic y WiSub y AruCo y ChaRuCo, que la cámara del dron ve que funcionan en su posición relativa. La empresa de comunicaciones y posicionamiento acústico basada en Trondheim, Water Linked, también suministra pequeños módems acústicos para posicionamiento de vehículos en la estación. El SDS también puede acomodar otros sensores, como el módem óptico de espacio libre BlueComm de Sonardyne para alimentación de video en vivo o descarga de datos de gran ancho de banda. También hay interfaces estándar, desarrolladas a través del grupo SWiG (Subsea Wireless Interface Group) y Deepstar, para la mecánica.
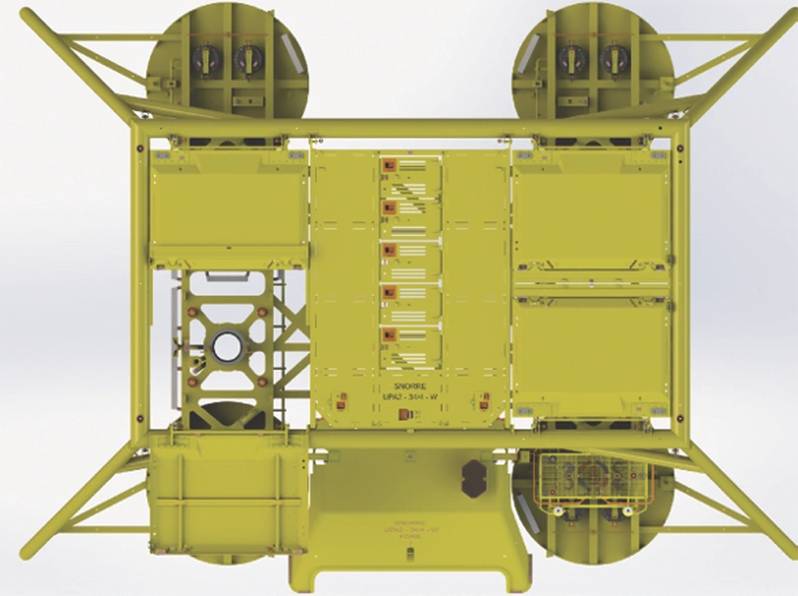 Diseño de estación de acoplamiento submarina de estándar abierto de Equinor, que se muestra encajándose en un colector, como una pequeña plataforma de helicóptero. (Imagen: Lógica Azul)
Diseño de estación de acoplamiento submarina de estándar abierto de Equinor, que se muestra encajándose en un colector, como una pequeña plataforma de helicóptero. (Imagen: Lógica Azul)
SDS, construido por Blue Logic en Noruega, se ha desplegado en un muelle en Trondheim y también a 2,2 kilómetros de la estación biológica de Trondheim, a 350 metros de profundidad. Otro se dirige al campo Åsgard, donde un "robot serpiente" de Eelume operará con un cable de alimentación y fibra óptica conectado a la unidad de producción flotante Åsgard A. Los siguientes pasos incluyen una implementación más amplia en el Proyecto de expansión de Snorre, donde se podrían usar siete SDS (integrados en múltiples o independientes con cubiertas de protección de fibra de vidrio) a 15 kilómetros de distancia y conectados a la alimentación y las comunicaciones en el diseño de campo.
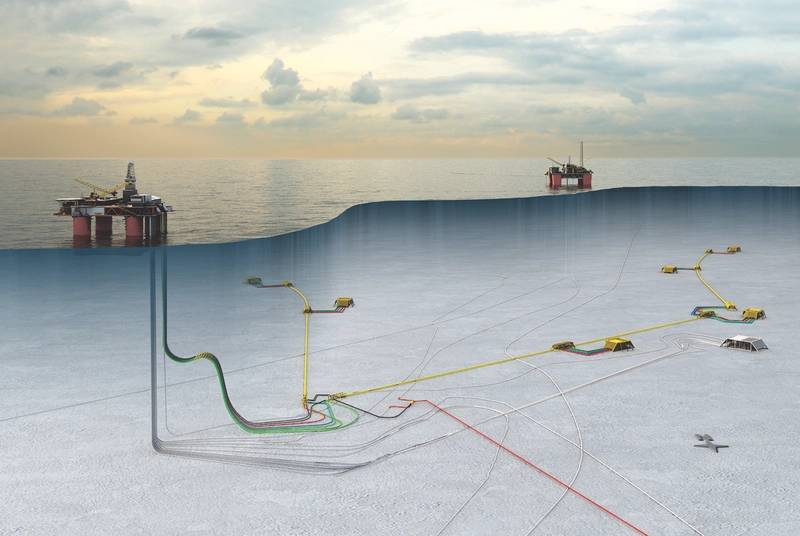 El diseño de campo del Proyecto de expansión Snorre, que pronto podría ser respaldado por drones submarinos. (Imagen: Equinor)
El diseño de campo del Proyecto de expansión Snorre, que pronto podría ser respaldado por drones submarinos. (Imagen: Equinor)
Desarrollando nuevos modelos
Estos desarrollos ahora están influyendo en la forma en que se están planificando nuevos desarrollos greenfield, dice Jamieson. De hecho, i-Tech 7 ha investigado los servicios IRM en todo el campo para Equinor utilizando un UID en el campo del Proyecto de Expansión Snorre (SEP) y Snorre A (SNA) en el Mar de Noruega, así como para otros campos.
El estudio evaluó el potencial para introducir vehículos híbridos submarinos mediante la identificación de las brechas técnicas que evitarían el despliegue a largo plazo del UID en el fondo marino. También evaluó y recomendó opciones para las configuraciones de la estación de acoplamiento para soportar el vehículo al proporcionar una visión general de las configuraciones y características requeridas. Como la potencia y una red de datos confiable son parte integral de su éxito, la compañía examinó las disposiciones operativas y de gestión para respaldar la actividad del vehículo híbrido submarino. El objetivo final del proyecto era recomendar un plan de desarrollo para permitir que los drones se 'activen' a fines de 2020.
"Los vehículos alojados en los fondos marinos que cuentan con el apoyo de las estaciones de acoplamiento de los fondos marinos, utilizados para inspecciones autónomas y vinculados a salas de control en tierra, para el control humano en el bucle en las tareas de intervención nuevamente está presionando los requisitos de una manera positiva", dice Jamieson. “Se requerirá que los vehículos sean residentes submarinos durante meses a la vez, sin servicio ni recuperación para reparación. Esta barra más alta en confiabilidad y control también está potenciando las operaciones tradicionales de ROV, con control remoto de vehículos desde centros de control en tierra y electrificación de vehículos para una mayor confiabilidad y eficiencia ”. Todo esto se suma a menos días de embarcación y personas en alta mar.
Existe la posibilidad de simplificar los sistemas submarinos. Los actuadores, además de los sistemas críticos de seguridad, pueden ser manuales, en lugar de hidráulicos o eléctricos, reduciendo los sistemas hidráulicos y eléctricos que deben instalarse bajo el agua, lo que significa menos cable.
Helge Sverre Eide, gerente comercial de Blue Logic, dice que para que los drones despeguen submarinos, el sistema submarino y las filosofías operativas deben cambiar. "Para que esto sea económico, debe aumentar el alcance del trabajo de los drones", dice. “Necesita nuevas herramientas y necesita ajustar o cambiar el sistema de producción submarino. Necesitas cambiar ambos lados de la ecuación. Las nuevas herramientas deben ser livianas para que un dron pueda volarlas. El mantenimiento submarino debe cambiar para tener piezas más pequeñas para cambiar. Ahora es posible una mentalidad diferente: si algo se apaga, puede cambiarlo. Esa es una nueva filosofía ".
 (Foto: Saipem) (Foto: Saipem) |
En Italia, Saipem ha estado ocupado con su Hydrone R, que comenzó una prueba de seis meses en el "parque de juegos" submarino de Saipem, cerca del puerto de Trieste, al noreste de Italia. Recientemente se anunció que el vehículo será desplegado por Equinor en alta mar en Noruega en 2020. Equinor, en nombre de la licencia de Njord, ha otorgado a Saipem un contrato de servicio submarino de $ 43.7 millones por 10 años para usar la tecnología a partir del momento en que el campo de Njord reanude la producción . Hydrone R se describe como un ROV híbrido con capacidades AUV, por ejemplo, tendrá manipuladores, para trabajos de intervención, y puede funcionar en una correa de 300 metros de largo, para control de ancho de banda completo en tiempo real, pero también puede viajar distancias entre submarinos campos, sin ataduras como un AUV, con comunicaciones acústicas de hasta 4 kilómetros. Una vez en el sitio de trabajo, podría cambiar a comunicaciones ópticas de gran ancho de banda para operaciones supervisadas. Hydrone podría desplegarse desde un garaje en el fondo del mar o desde un sistema desplegado en superficie en una misión. Con una capacidad de 3.000 metros, podría funcionar durante 8-10 horas sin una correa, y hasta 10 kilómetros, dice Stefano Maggio, gerente técnico de Saipem. La implementación desde un host de superficie podría ser más fácil porque no necesita infraestructura submarina, dice Maggio. "Podría ser sensible a las condiciones climáticas para el despliegue, pero tiene una capacidad de mantenimiento fácil". Sin embargo, "el sistema residente submarino es insensible al clima, por lo que lo implementa y permanece allí durante seis meses, un año, antes de la recuperación". Pero significa que no puede mantenerlo regularmente, por lo que se requiere la mayor confiabilidad ". |
Pozo exploratorio en bloque offshore del Mar Negro se seca
")
La primera turbina se alza imponente en el parque eólico marino estadounidense de 2,6 GW de Dominion Energy
-167623 "(Crédito: Dominion Energy)")
Equinor extiende la estadía del buque de perforación Seadrill frente a Brasil

El campo Sèmè de Akrake comenzará a producir a principios de febrero tras finalizar la perforación
-167415 "Stella Energy 1 MOPU (Crédito: Drydocks World)")
Seadrill consolida su carga de trabajo de perforación offshore con adjudicaciones de contratos multirregionales

-167309 "Buque de perforación West Capella (Crédito: Seadrill)")
Brava Energia comprará participación de Petronas en activos de la Cuenca de Campos por 450 millones de dólares
-167178 "(Crédito: Brava Energia)")
Ulstein Verft lanza el primero de los dos nuevos edificios CSOV de JP Morgan
-166941 "(Crédito: Ulstein Verft)")
HOS y Saronic se unen para probar buques autónomos en alta mar

QatarEnergy, TotalEnergies y Eni se preparan para explorar el bloque offshore del Líbano

Borr Drilling completa la ampliación de México y un nuevo contrato en EE. UU. para dos plataformas autoelevables

Venezuela reducirá la producción de petróleo

Saipem obtiene un contrato de gas turco de 425 millones de dólares para la expansión de Sakarya
-166725 "(Crédito: Saipem)")